
Un cuarto de siglo después de que el programa espacial soviético dejara caer su velo de secreto, siguen aflorando numerosos detalles fascinantes sobre el enorme alcance de las ambiciones espaciales de la URSS.
La última información hecha pública revela lo que podría haber sido la primera propuesta soviética para colonizar la luna de forma permanente.
Concebido en 1967 en plena carrera lunar con Estados Unidos, el audaz plan fue desarrollado en el seno del mismo grupo de expertos que lanzó el Sputnik, el primer satélite artificial, en 1957, y que puso en órbita al primer hombre, Yuri Gagarin, cuatro años después, recuerda Popular Mechanics.
Los ingenieros soviéticos planeaban comenzar la construcción de su base lunar con una máquina polivalente de ingeniería lunar (LIM, por sus siglas en ruso).
Un robot de tres toneladas de peso iba a ser utilizado para la exploración, la perforación y retirada de suelo y el transporte de carga. Una grúa parecida a un telescopio y un taladro se montarían a los lados de la cabina. El robot también estaría equipado con iluminación externa, videocámaras y ventanas.
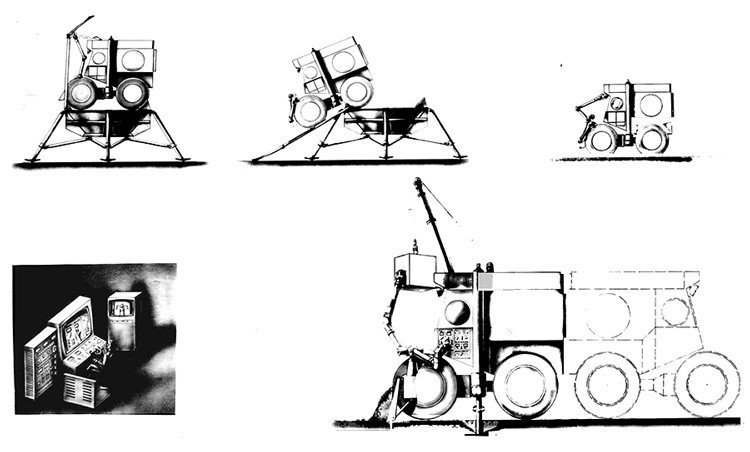
Para propulsar tan exótico vehículo, los ingenieros soviéticos diseñaron un motor de combustión interna de cuatro cilindros que habría de quemar combustible de cohete autoinflamable, mezclando combustible líquido con un oxidante.
Un motor bastaría para propulsar el vehículo, pero cuando el LIM se enfrentase a las dificultades del terreno, podría activar ambos motores y activar todas las ruedas motrices.
La cabina del LIM tendría capacidad para un conductor sin traje espacial y, en caso de emergencia, una persona más. El robot rodante también podría ser operado sin tripulación siendo controlado de manera remota desde la base lunar o desde la Tierra.
El hábitat y el 'autoentierro'
Según el guión concebido por los ingenieros rusos, un par de 'rovers' debían ser transportados a la Luna junto con un módulo habitacional de 10 metros de largo.
Subdividido en dos pisos, este módulo podría albergar entre tres y seis personas. Los suministros iniciales de a bordo mantendrían a una tripulación de tres personas durante al menos tres meses.
El hábitat se colocaría bajo la superficie lunar para evitar la radiación cósmica.
El plan presuponía que uno de los 'rovers' excavaría el suelo y el otro lo arrojaría por encima para cubrir el módulo.
Para zonas de superficie más dura, los ingenieros tenían la idea de utilizar una herramienta cortante para sacar 255 bloques cuadrados del suelo, que luego se utilizarían para construir un muro protector alrededor de la futura población.
La sima resultante en el suelo sería utilizada como refugio antiradiación.
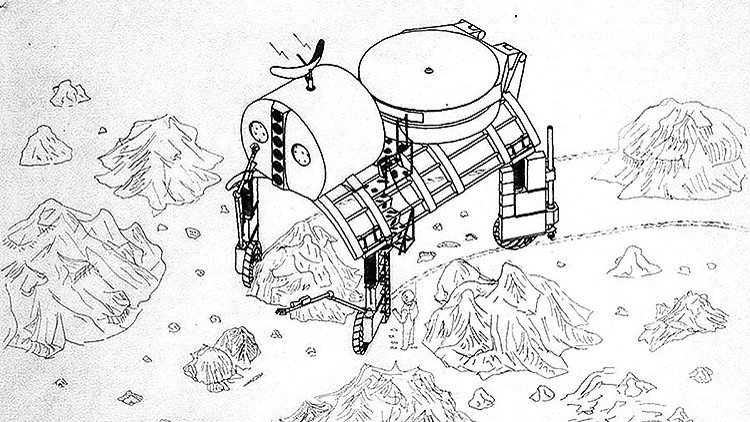
La parte más exótica del plan proponía un módulo habitacional autopropulsado capaz de enterrarse a sí mismo.
Un cilindro de seis metros de largo y 3,6 metros de ancho sería equipado con cabida para hasta seis cosmonautas.
Después de la llegada a la Luna, el módulo se descargaría desde su plataforma de aterrizaje junto con un remolque autopropulsado de cuatro ruedas.
Una vez en posición horizontal, todo el artilugio emprendería un viaje por la superficie lunar a una velocidad de hasta seis kilómetros por hora, en busca de un sitio con la superficie lo suficientemente suave para el 'autoentierro'.
En el lugar apropiado, se pondría en marcha un mecanismo que haría girar al módulo cilíndrico alrededor de su eje principal horizontal.
Hojas puestas en forma de espiral en el exterior del módulo permitirían excavar el suelo y expulsar la tierra hacia fuera.
Deslizándose hacia abajo a lo largo de los carriles de guía del remolque, el cilindro gigante se hundiría lentamente en la zanja que iría formándose.
Al llegar a la profundidad adecuada, una cámara de descompresión telescópica se extendería desde el módulo para proporcionar acceso a la tripulación en la superficie lunar.
Los diseñadores estimaban que el mecanismo tardaría unas 4,3 horas para enterrarse por completo en el terreno arenoso.
Sin embargo, los planes de colonización lunar no se concretaron, siendo limitada la exploración lunar de la URSS a varios 'rovers' pequeños que alunizaron en nuestro satélite.
